MOTIVACIÓN DEL PROYECTO
a.- De lógica científica en la investigación histórica llevada a cabo por el equipo de investigación del proyecto, ya que, aprovechando los antecedentes y resultados previos del equipo investigador relacionados con la temática del proyecto, se afrontarán nuevos desarrollos tecnológicos que permitan avanzar en la vanguardia del conocimiento, sin perder la experiencia en proyectos previos y el capital humano invertido en los últimos años.
b.- Por ser un proyecto multidisciplinar. La presentación de métodos técnologicos que permiten completar los métodos biológicos es de por si un hito que se considera de vanguardia en la gestión de los recursos marinos. En esta línea, los investigadores involucrados en el proyecto SASES disponen de un know-how y de una gran experiencia en interacción entre ingenieros y cientificos para el desarrollo e innovación de tecnologias marinas.
c.- Por la innovación en las aportaciones tecnológicas que permiten salvar las limitaciones de los sistemas comerciales actuales de TAGs submarinos como: datos no en tiempo real, resolución mayor de 5m a profundidades de más de 300 m, así como el uso obligatorio de numerosos receptores que se deben fondear con precisión.
HIPÓTESIS
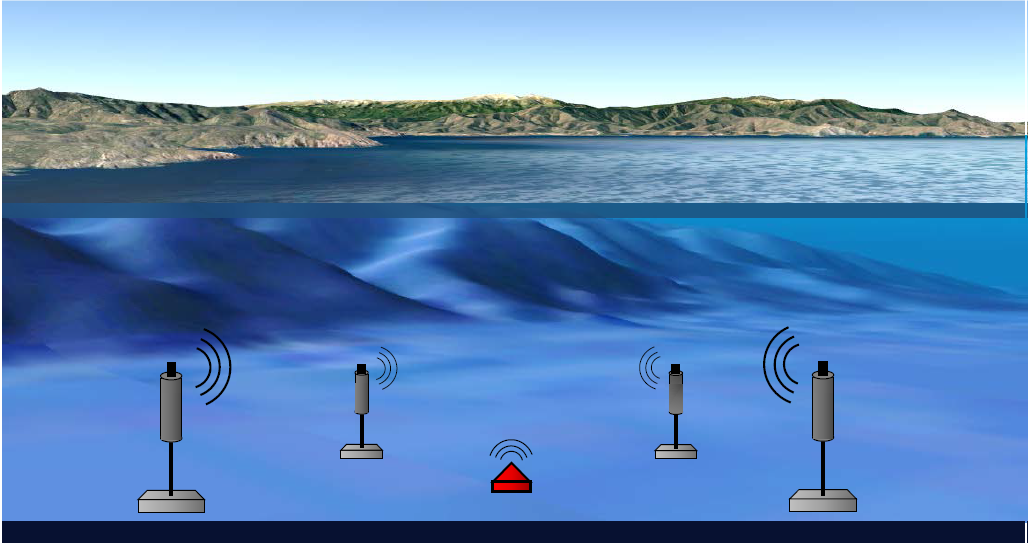
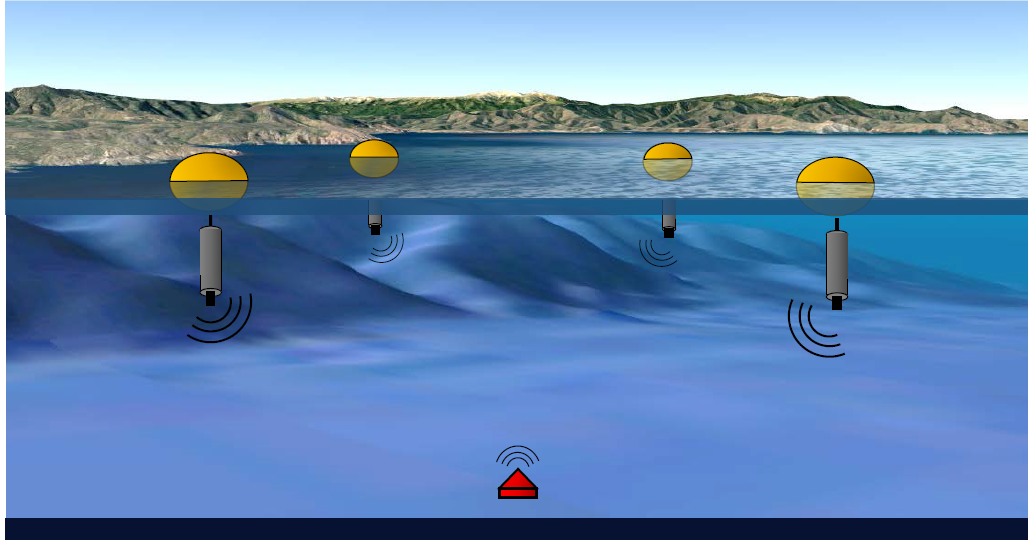
Hipótesis de partida (H0): se asume que el sistema acústico submarino para la monitorización del comportamiento espacial de especies desarrollado prescindirá del fondeo de receptores, dispondrá de datos en tiempo real, de un alcance de 400 m de profundidad, de una resolución inferior a los 5 m, y las etiquetas acústicas no sobrepasaran un tamaño de 10x20 mm y un peso de 2 g en el agua.
a.- Los resultados previos del equipo investigador en el proyecto RITFIM (CTM2010-16274), en la evaluación de la respuesta acústica en el proceso de encapsulado de diferentes piezoeléctricos, para contribuir en el compromiso de reducir el tamaño del transmisor y aumentar su alcance.
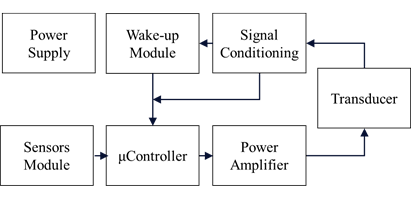
b.- La utilización de microcontroladores de muy bajo consumo y con altas prestaciones para implementar una transmisión bidireccional, que permita calcular el rango, y con una modulación OFDM para mejorar el alcance y la robustez de las transmisiones, sin tener que aumentar el tamaño del componente piezoeléctrico del emisor.
d.- Integrar sensores físicos a partir de la propuesta realizada en el proyecto “Multi-MEMS sinérgicos y eficientes en CMOS para la internet de las cosas TEC2015-67278-R”.
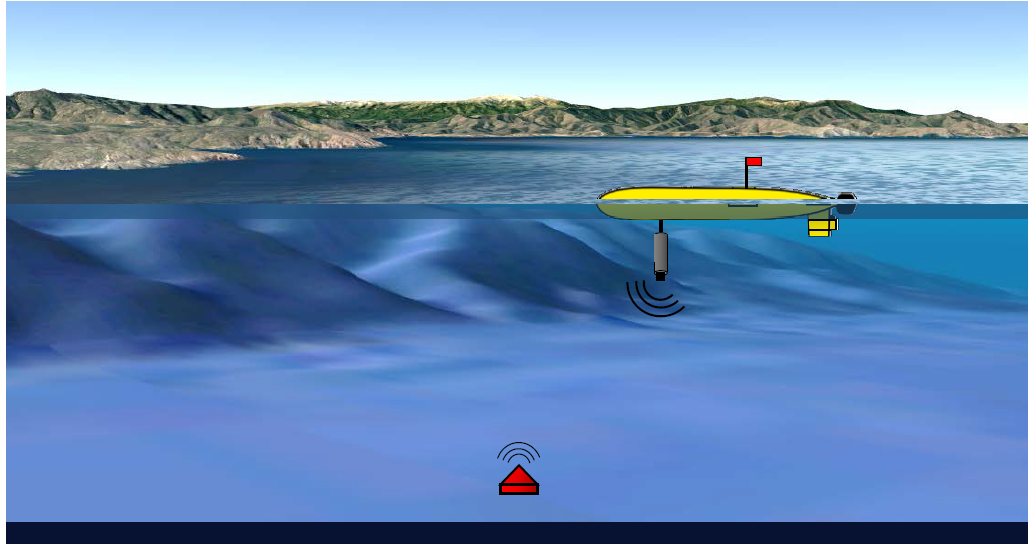
c.- Recurrir a los vehículos autónomos submarinos para georreferenciar la posición del TAG mediante arquitecturas de Range-Only, para alcanzar la resolución, y Single-Beacon para evitar los costes de fondeo de receptores.
Si se cumple esta hipótesis, este desarrollo tecnológico será fundamental en la monitorización de indicadores fisicoquímicos y biológicos necesarios para evaluar el estado medioambiental de las regiones marinas, requerido por la directiva 2008/56/CE del Parlamento Europeo y del Consejo de 17 de junio de 2008.